Hello! My name is Ankush, and I am a first-year PhD student in Robotics at Stanford University. In my undergrad at Stanford, I worked with Prof. Monroe Kennedy III and Prof. Karen Liu on learning for manipulation and novel robotic hardware. Previously, I have worked with Dr. Nathaniel Hanson at the MIT Lincoln Laboratory Human Resilience and Technology Group on soft robotics for disaster response. I also have experience in industry, across companies small and large designing and testing a wide range of engineering products (Tesla, Opal Camera, Embark Trucks).
🎓 June 2024: I graduated from Stanford University with a BS in Electrical Engineering.
⚡ Summer 2023: I interned as a battery electronics design engineer at Tesla.
Publications
I'm interested in robotics, tactile sensing, and dexterous manipulation. My work spans from hardware design to learning methodologies for robotic systems.
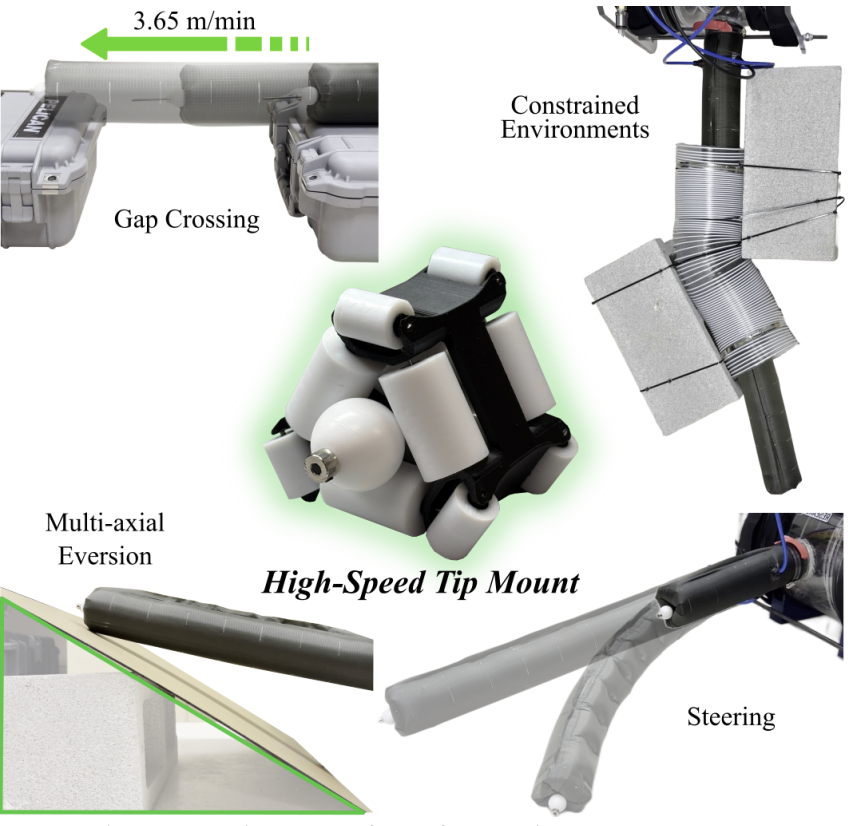
A triangular roller tip mount that carries sensors and tools on soft vine robots growing through tip eversion, with a benchmarking testbed that characterizes how mounting approaches affect growth speed and internal resistance.
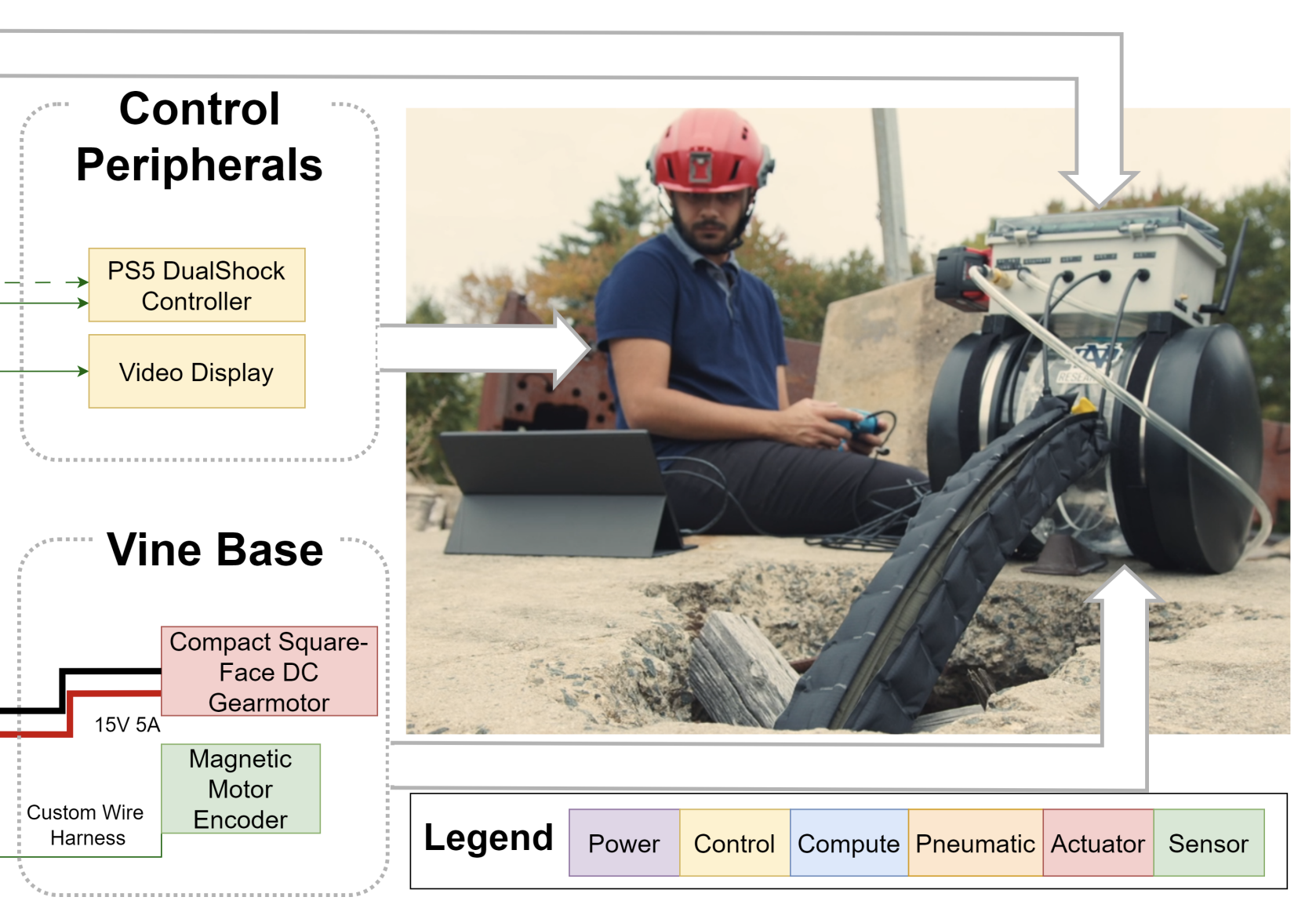
Experiments with the SPRoUT vine robot in engineered collapse structures for urban search and rescue scenarios. Tests viability, control, and sensorization of soft growing robots.
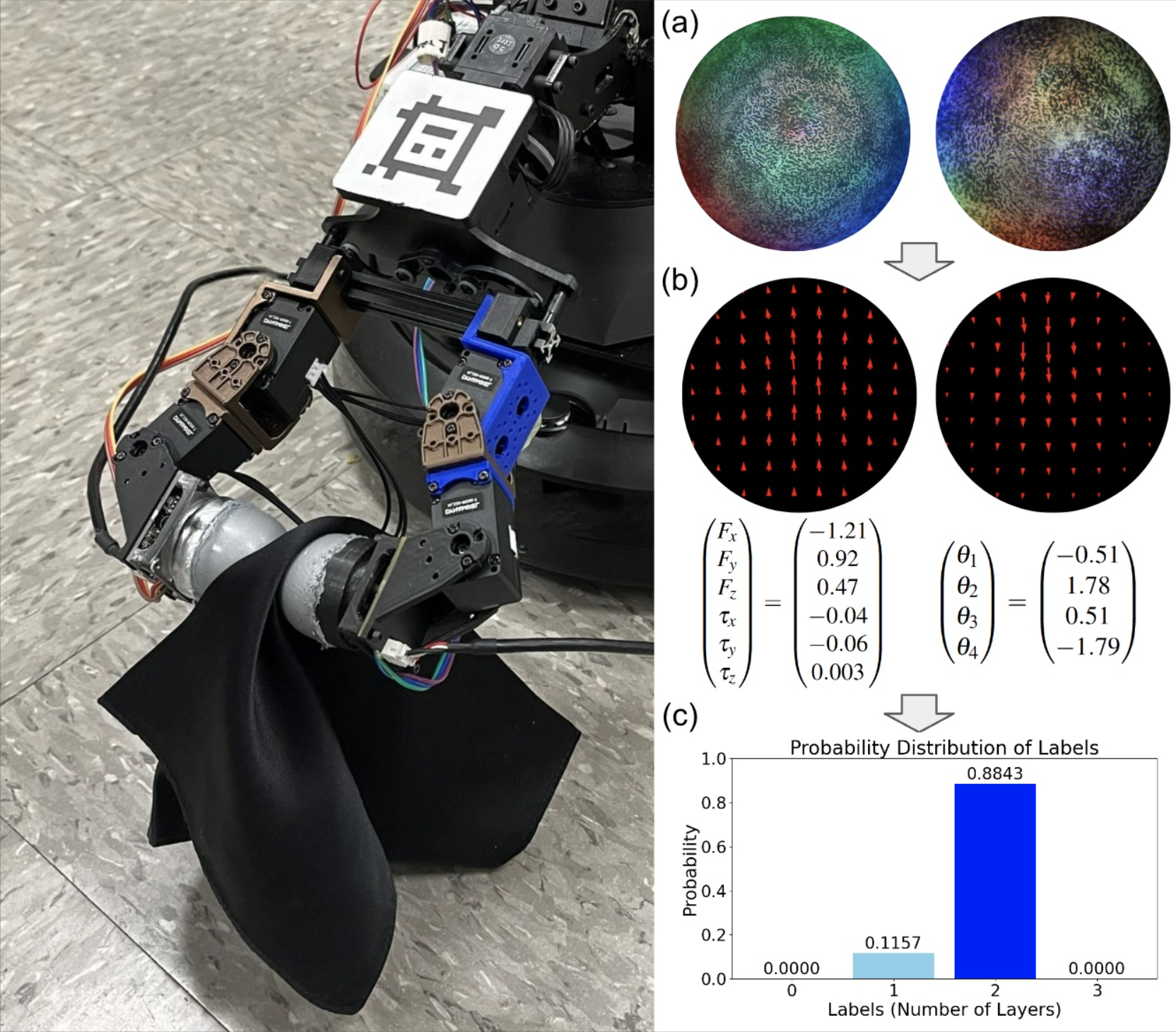
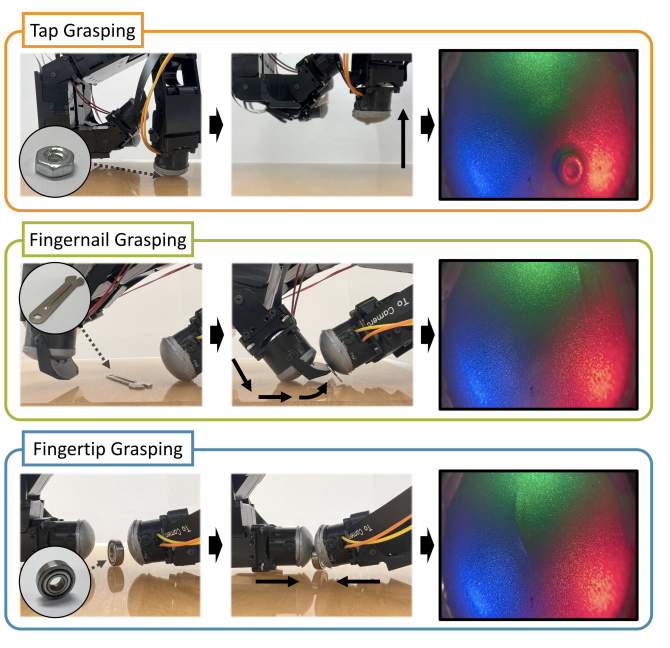
Soft optical tactile fingertip enabling tap/rolling/fingernail grasping strategies. Demonstrates >90% success rate across small and thin objects including 1mm basil seeds and thin paperclips.
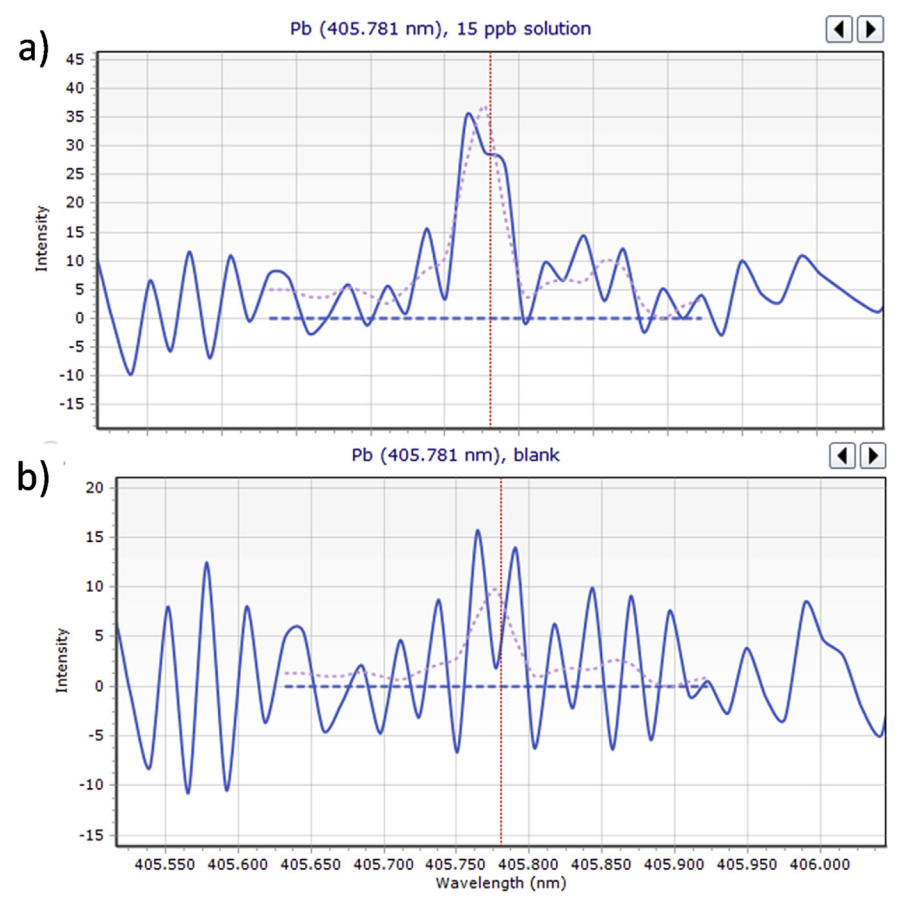
Development of a core-double shell composite consisting of sand base substrate with sequential layers of chitosan and graphene oxide for Pb(II) adsorption from aqueous solutions. The material achieved lead concentrations below EPA limit (<15 ppb), with adsorption characteristics following Freundlich isotherm model.
CS123: A Hands On Introduction to Building AI-Enabled Robots
With Hands-On Robotics and Prof. Karen Liu, I have designed an undergraduate introductory AI robotics course, transforming a Robotics Club project into something much bigger. As Head Teaching Assistant over the past three years since the course's inception, I helped transform Pupper into an eductional platform in CS 123: A Hands-On Introduction to Building AI-Enabled Robots. We have also been featured by Stanford report.
The course teaches robotics fundamentals through hands-on construction and programming, covering motor control, kinematics, and walking algorithms. Students also explore cutting-edge topics in reinforcement learning, computer vision, and large language models for robotics. Each quarter culminates in a demo day where students showcase their projects to industry professionals. The course has now taught over 150 students, where each class culminates in a demo day where students showcase their projects to industry professionals and roboritcs researchers from academia.
Teaching Assistant — Stanford University
Teaching students from Freshmen through Graduate level
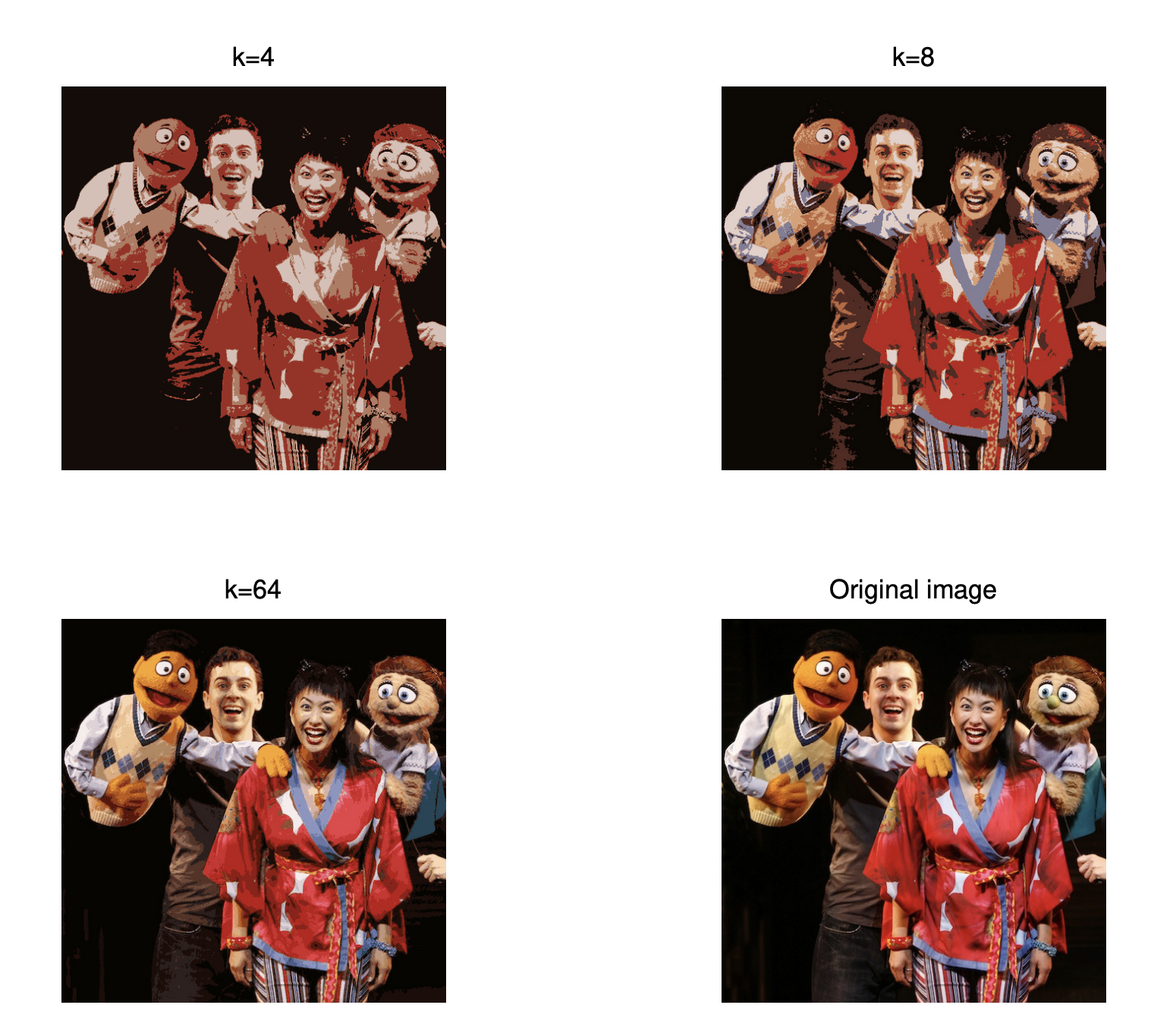
ENGR108 covers the fundamentals of vectors and matrices, solving linear equations, least-squares methods, and their applications. The course emphasizes practical implementation using Julia programming language, with applications spanning tomography, image processing, data fitting, time series prediction, and finance.
Dr. Pupper: Social Companion Robots for Immunocompromised Pedatric Patients in Hospitals
Partnering with Stanford Children's Hospital and Dr. Teresa Nguyen, I have helped start an initiative called Dr. Pupper to help pediatric patients with the psychosocial impacts of hospitalization. Our work has been featured by ABC and Univision. Below are some results from a project done in collaboration with students from UCSF.
Outside of my research and project work, I enjoy dancing, and have been dancing with the Stanford Bhangra team since my freshmen year. In my senior year, I captained the team, creating choreography and fostering the community. We perform at competitions all across the nation, recently at UC Santa Barbara, Purdue University, and University of Maryland. Check out our feature in the Stanford Daily. Here is a performance at Blacksburg Ki Badmashi at Virginia Tech in 2024 (much of this is my choreo, I'm in blue!).
Patents
I have developed innovative solutions for environmental testing and sustainable energy systems, resulting in multiple patents for practical applications.
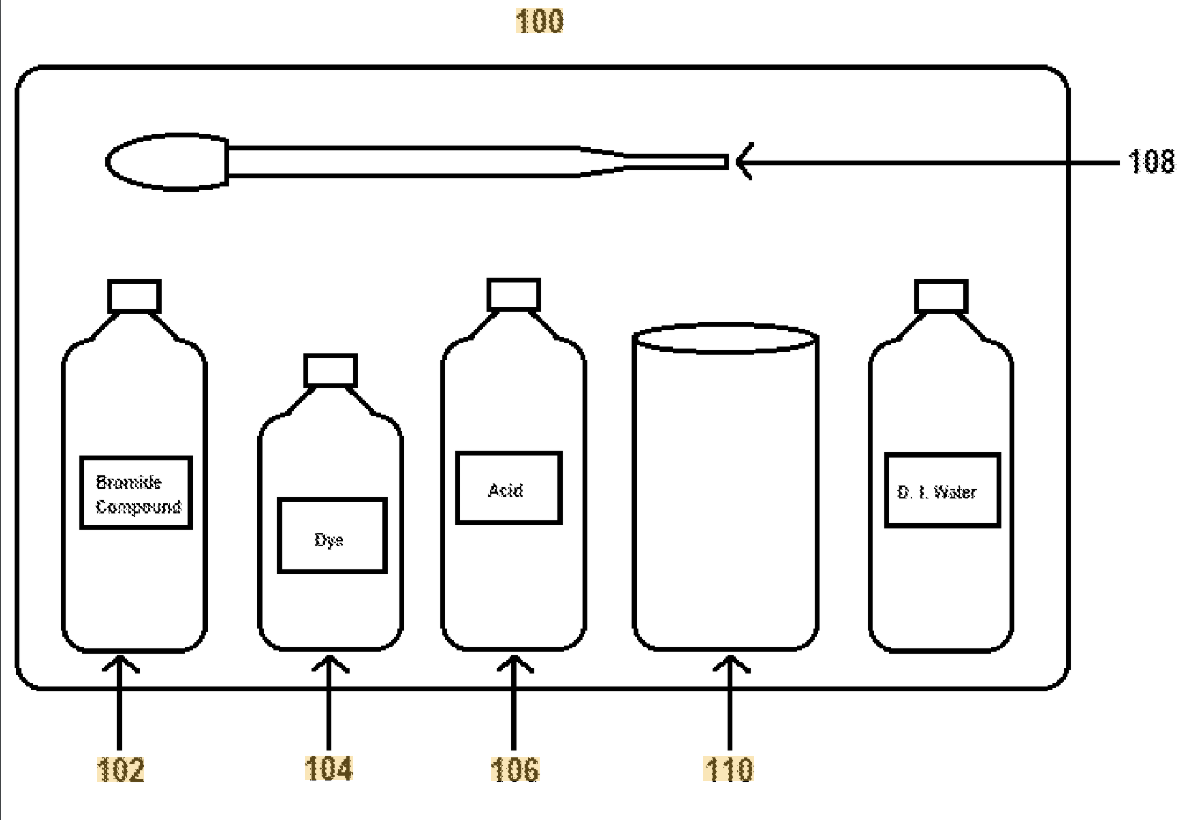
A test kit for detecting trace levels of arsenic in water samples using a stable bromide compound, dye, and acid solution. Capable of detecting concentrations up to 0.03 parts per million with accuracy and repeatability, meeting US EPA and WHO standards for potable water testing.
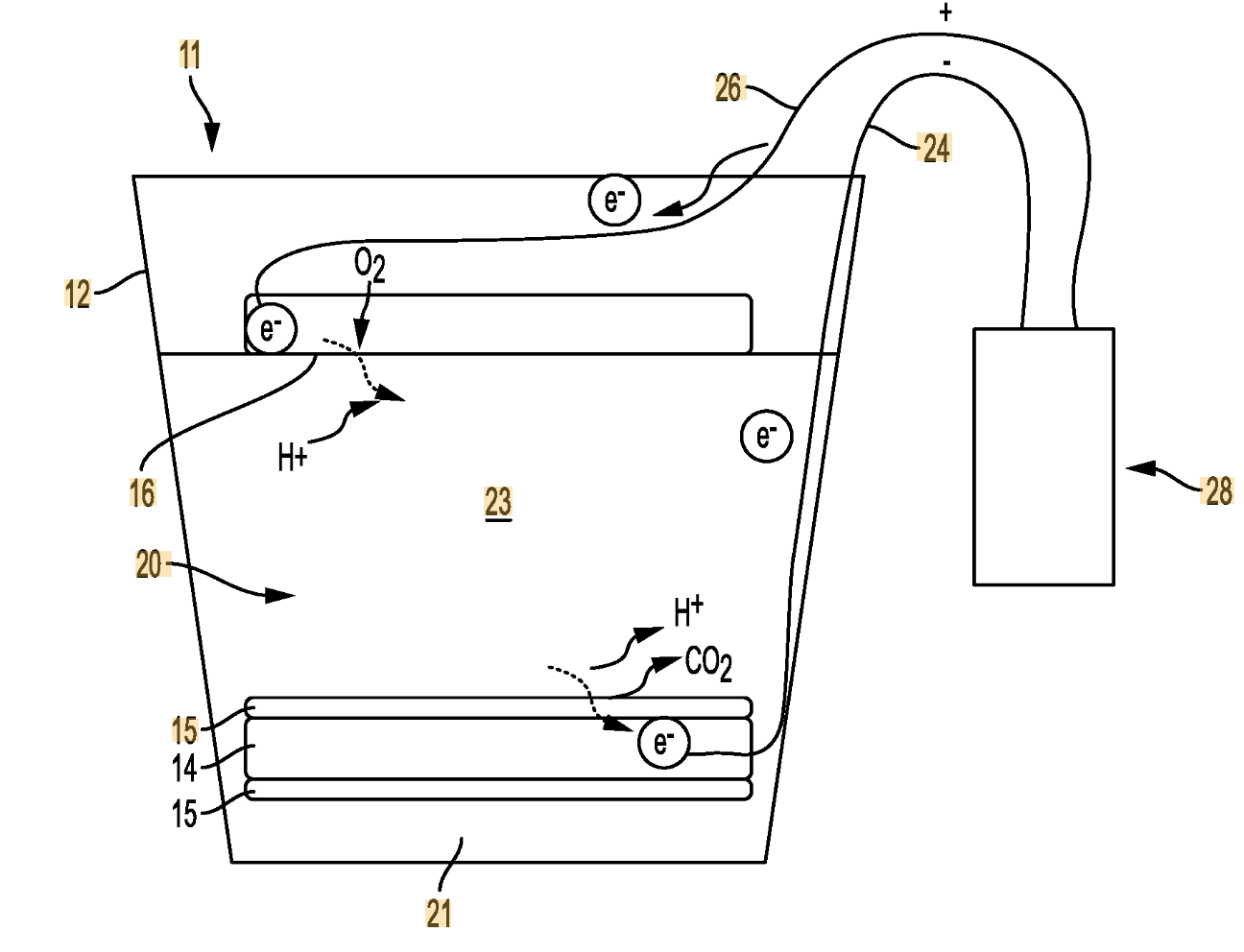
A microbial fuel cell light assembly that generates electricity through microbial activity, providing sustainable lighting solutions for various applications. This innovative system harnesses biological processes to create clean energy.